



Your cart
No hay más artículos en tu carrito
Actividad Giro con sensor con LEGO MINDSTORMS Education EV3 | #LessonPlan

¿Cómo gira LEGO® MINDSTORMS Education EV3 con el sensor?
Tu misión es programar tu robot para completar un punto hacia un ángulo exacto utilizando el Sensor Gyro.
¿CÓMO AYUDAR A LA CONFIANZA CON LEGO MINDSTORMS Education EV3?
Ayuda al alumnado de secundaria a construir la confianza de forma natural y sencilla. Anímales a tomar riesgos, solucionar problemas y aplicar sus conocimientos a través del aprendizaje práctico.
Crea un entorno dinámico en el aula para que el alumnado del siglo XXI participe en experiencias STEAM prácticas y auténticas. Motívales y apóyales para que aprendan a través del juego, piensen críticamente y colaboren de forma creativa con los demás.
LEGO MINDSTORMS es una solución práctica y transversal para el aprendizaje de las disciplinas STEM que combina elementos de LEGO Technic, un software amigable perfecto para el aula y lecciones adaptadas a los contenidos curriculares, con el fin de fomentar la confianza creativa y el pensamiento crítico. Esta solución usa guías intuitivas y ladrillos inteligentes para trabajar materias como ingeniería, programación y física, y pone temas reales relacionados con las disciplinas STEM en las manos de los alumnos.
Materias: Ciencia, STEAM, Tecnología, Ingeniería.
Curso: Educación Secundaria.
Duración de la actividad: 45-90 min.
Dificultad: Intermedia.
OBJETIVOS DE LA ACTIVIDAD
Después de completar la sesión, el alumnado sabrá:
Ciencia e Ingeniería
- Patrones
- Causa y efecto: mecanismos y explicaciones
Matemáticas
- Resolver problemas matemáticos de la vida real que involucran la medida de ángulos, el área, el área de superficie y el volumen.
- Buscar y expresar regularidad en razonamientos repetidos.
Robótica
- Control de movimiento de LEGO MINDSTORMS Education EV3 utilizando el Gyro Sensor.
- Comprender la diferencia entre la programación de salida simple y la programación basada en sensores.
- Ventajas y limitaciones de los sensores.
MATERIAL NECESARIO
- Set educativo LEGO MINDSTORMS Education EV3
- Software o APP de programación LEGO MINDSTORMS Education EV3
- Set del Desafío Espacial EV3
RECURSOS ADICIONALES
- Introducción al Desafío Espacial EV3
- Cuadrículas de Currículum del Desafío Espacial EV3
- Sensor Gyro EV3 (Instucciones de construcción)
ACTIVIDAD GIRAR CON SENSOR CON LEGO MINDSTORMS Education EV3: PASO A PASO
1. PASO A PASO
- Lee este material del profesor.
- Si crees que es necesario, planifica una lección utilizando el material de iniciación en el software EV3 o la app de programación EV3. Esto ayudará a familiarizar al alumnado con LEGO® MINDSTORMS® Education EV3.
- Construye tu robot.
- Crea tu programa.
- Coloca tu robot en la posición 2 en el tapete 2 y ejecuta el programa.
- Documenta tus hallazgos.
- Continúa aprendiendo más sobre el uso del Gyro Sensor para controlar los movimientos de tu robot.
Antes de comenzar esta misión, es posible que desees revisar estos tutoriales de Robot Educator:
- Parada de ángulo
- Trayectoria circular
Durante esta misión, el alumnado explorará la relación entre la entrada del sensor y el comportamiento del robot. Las rotaciones de la base de conducción serán controladas por el Gyro Sensor.
2. CONECTAR (5 min.)
Rotar utilizando una rueda no es muy preciso. Si intentas hacer funcionar tu robot en una superfície resbaladiza, es posible que no alcance el ángulo correcto. Lo que hace el Gyro Sensor es ayudarlo a hacer movimientos mucho más precisos.
Tu misión es programar tu robot para completar un giro de punto a un ángulo exacto utilizando el Sensor Gyro.
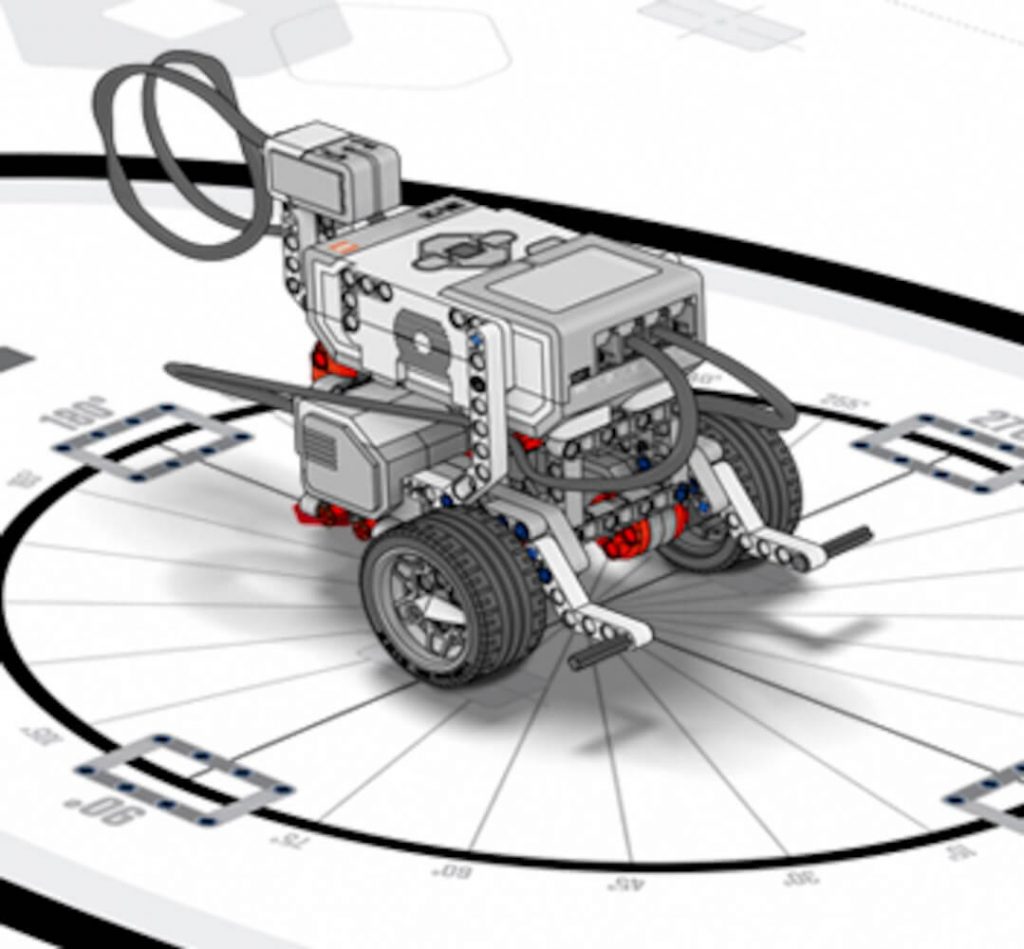
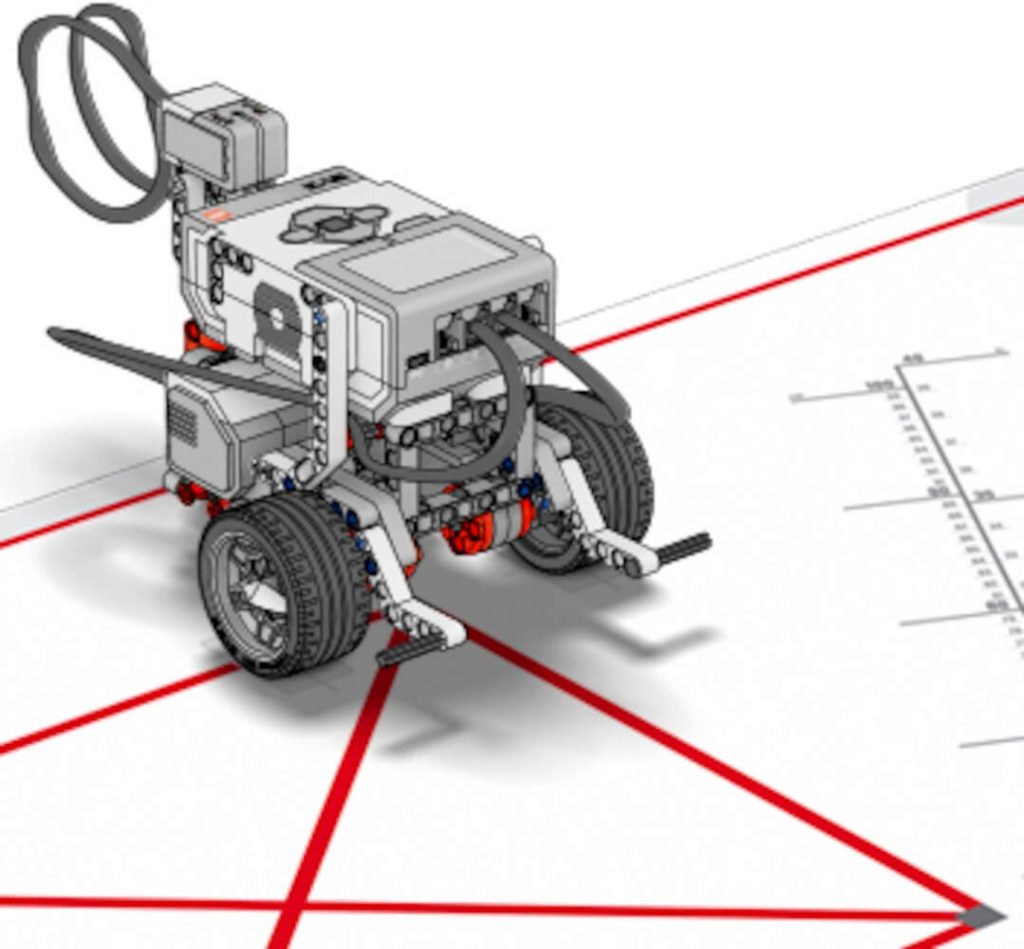
3. CONSTRUIR (20 min.)
Construye tu robot
Haz clic en los enlaces de cada pie de fotografía para abrir las instrucciones de construcción, luego construye el modelo y regresa a este proyecto para continuar. (Omite este paso si el modelo ya está construido.)
Ver Instrucciones de Construcción
IMPORTANTE: Mantén el Gyro Sensor y el brick EV3 fijos cuando conectes el cable y durante la puesta en marcha del brick EV3.
Crea tu programa
Recrea el programa que mostramos y después descárgalo en tu robot.

Descargar "Programa de muestra"
Resumen del programa
- Comienzo
- Mover el tanque - Potencia B [10], Potencia C [-10]
- Espera - Sensor de giro - Comparación de ángulo - Tipo [3] (mayor o igual que), grados [90]
- Mover tanque - apagado
Solución de problemas
El ángulo debe ajustarse; por lo general, el valor debe ser inferior a 90 grados.
Teoría
Cuando se usa el sensor de giro, el valor de rotación escrito en el bloque del sensor corresponde a la rotación de la base de conducción. La precisión del sensor es de +/- 3 grados.
La holgura del motor y la demora causada por la detención del momento de rotación también pueden afectar la precisión.
La potencia de la batería, el tamaño de las ruedas, la fricción del robot en la superficie, la distancia entre las dos ruedas ya no son factores que pueden influir en la precisión de la rotación del robot.
4. CONTEMPLAR (20 min.)
Ejecuta el programa y observa
Coloca tu robot en la posición inicial 2 del tapete 2 y ejecuta tu programa.
Documenta tu hallazgo
- Describe aquí lo que hizo cada uno de tus bloques de programación: "El punto de mi robot giró hasta que el Gyro Sensor, leyó el valor 90 grados y se detuvo."
- Calcula el ángulo de rotación de su robot: "Mi robot giró aproximadamente 90 grados."
- Explica la diferencia entre la rotación de tu robot con y sin el sensor de giro: "La rotación controlada por el Gyro Sensor está vinculada a menos factores de incertidumbre en su robot.
Contemplar y modificar
Reconstruye tu programa para hacer que tu robot realice los siguientes giros:
- En el sentido de las agujas del reloj durante 45 grados
- En el sentido de las agujas del reloj 180 grados
- En el sentido de las agujas del reloj para 360 grados, seguido de un giro en sentido contrario a las agujas del reloj para 360 grados
¿Cuánto giró su robot, en comparación con lo que el programa le dijo que hiciera? Rotó típicamente más lejos debido al momento de rotación.
Tarea: Gira tu robot en el sentido de las agujas del reloj durante 45 grados.

Solución - Resumen del programa
- Mover el tanque - Potencia B [10], Potencia C [-10]
- Espera - Sensor de giro - Comparación de ángulo - Tipo [3] (mayor o igual), grados [45]
- Mover tanque - apagado Solución de problemas
- El ángulo debe ajustarse; por lo general, el valor debe ser inferior a 45 grados.
Tarea: Gira tu robot en el sentido de las agujas del reloj 180 grados.

Solución - Resumen del programa
- Mover el tanque - Potencia B [10], Potencia C [-10]
- Espera - Sensor de giro - Comparación de ángulo - Tipo [3] (mayor que o igual), grados [180]
- Mover tanque - apagado
- Solución de problemas
- El ángulo debe ajustarse; por lo general, el valor debe ser inferior a 180 grados.
Tarea: Gira tu robot en el sentido de las agujas del reloj en 360 grados, seguido de un giro en sentido contrario a las agujas del reloj en 360 grados.

Solución- Resumen del programa
- Comienzo Mover el tanque - Potencia B [10], Potencia C [-10]
- Espera - Sensor de giro - Comparación de ángulo - Tipo [3] (mayor o igual que), grados [360]
- Mover tanque - apagado
- Espera - Segundos [2]
- Mover el tanque - Potencia B [10], Potencia C [-10]
- Espera - Sensor de giro - Comparación de ángulo - Tipo [5] (menor o igual a), grados [0]
- Mover tanque - apagado
5. CONTINUAR (15 min.)
Continuar explorando
Crea un nuevo programa usando una trayectoria circular para hacer que tu robot conduzca en un cuadrado. Cuando esté listo, pruebe su programa en la posición inicial 4 en la tabla de aprendizaje 1.

Solución - Resumen del programa
- Trayectoria circular - Cuenta [4]
- Dirección de movimiento - grados [682], potencia [30]
- Espera - Tiempo [1s]
- Mover tanque encendido, potencia B [10], potencia C [-10]
- Espera - Sensor de giro - Cambio de ángulo - Dirección [0] (Aumento), grados [85]
- Mover tanque - apagado
- Espera - Tiempo [1s]
Solución de problemas
El ángulo debe ajustarse; por lo general, el valor debe ser inferior a 90 grados.
Explica aquí para qué se puede usar un bucle: "Puedo usar la estructura de trayectorias circualres para repetir acciones."
OPCIONAL
- Crea un nuevo programa que haga que tu robot conduzca en un triángulo. Cuando esté listo, pruebe su programa en la posición inicial 4 en el tapete 1.
- Programa tu robot para conducir en otras formas.

¡Ahora puedes usar el sensor de giro!