



Tu carrito
No hay más artículos en tu carrito
Aparcamiento autónomo con LEGO MINDSTORMS Education EV3 | #LessonPlans

A partir de un método innovador en el aprendizaje de los alumnos en el aula se busca conseguir el desarrollo de las habilidades y competencias del siglo XXI. A partir de actividades de robótica educativa, el alumnado resuelve problemas reales mientras se divierte jugando.
Esta semana os proponemos una actividad de LEGO Education que busca trabajar con el alumnado el diseño y la programación de un robot LEGO MINDSTORMS Education EV3 para que aparque de manera autónoma.
Con esta actividad se trabaja: programación, STEM e ingeniería. Curso: 6-8 grades Duración de la actividad: 45-90min. Dificultad: PrincipianteOBJETIVOS DE LA ACTIVIDAD
- Comprender que los algoritmos son herramientas de llevar a cabo una serie de instrucciones en orden.
- Explorar el concepto de Salidas comparando las diferentes formas en que se puede mover un robot con ruedas.
MATERIAL NECESÁRIO
- Set LEGO MINDSTORMS Education EV3
- Software de programación LEGO MINDSTORMS Education EV3
- Software ROBOTC (opcional)
MATERIAL ADICIONAL
- Introducción a EV3 – Actividades de programación
- Enlaces curriculares
- Evaluación
- Modelo base EV3 (Instrucciones de construcción)
HOJA DE TRABAJO DEL ESTUDIANTE
PASO A PASO
Mostrar Vídeo
Después de mostrar el vídeo, el profesor debe iniciar un debate en el aula a partir de las siguientes preguntas:- ¿Cómo funcionan los vehículos autónomos?
- ¿Qué se necesitaría para garantizar que los vehículos autónomos son seguros?
- ¿Qué tipo de movimientos necesitan realizar los vehículos autónomos?
-
CONSTRUIR (15 – 30min)
-
Preparación
-
Construcción
VER INSTRUCCIONES DE CONSTRUCCIÓN
Los alumnos deben realizar la siguiente verificación de construcción antes de programar sus robots:- ¿Los cables están conectados correctamente desde los motores a los puertos B y C?
- ¿Están las ruedas correctamente instaladas?
- ¿Las ruedas giran libremente?
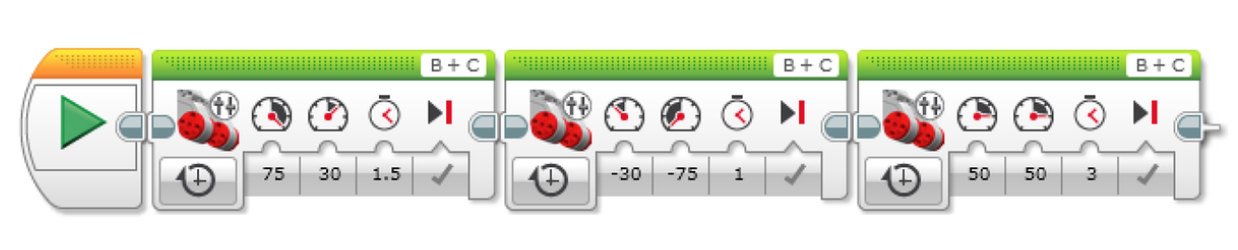
- Comenzar el programa
- Girar la base de manejo y parar después de 1,5 segundos.
- Girar la base de conducción hacia la izquierda y parar después de 1 segundo.
- Mover la base de conducción hacia adelante durante 3 segundos.
DESCARGAR CÓDIGO DE MUESTRA
Nota: Para que los alumnos obtengan un poco más de ayuda, el profesor debe remitirlos a los tutorials de Robot Educator. En el software EV3: Robot Educator> Conceptos básicos> Movimiento directo Robot Educator> Conceptos básicos> Movimiento curvo Robot Educator> Conceptos básicos> Movimiento tanque En la aplicación de programación EV3: Robot Educador> Movimiento curvo-
OBSERVAR (35 min)
- Aparcamiento en paralelo
- Ángulo de aparcamiento
- Aparcamiento perpendicular
 POSIBLE SOLUCIÓN: APARCAMIENTO PARALELO EN MODO AUTÓNOMO
POSIBLE SOLUCIÓN: APARCAMIENTO PARALELO EN MODO AUTÓNOMO
- Iniciar el programa.
- Avanzar en línea recta a la velocidad deseada.
- Esperar 1 segundo.
- Invertir la rotación del motor mientras gira para completar 1,5 rotaciones
- Invertir la rotación del motor mientras gira en sentido contrario durante 1,5 rotaciones.
- Conducir hacia atrás en línea recta durante 0,5 rotaciones.
- Avanzar en línea recta durante 1 giro.
DESCARGAR CÓDIGO DE MUESTRA
Opción de diferenciación Pedir a los alumnos que creen un programa que simule luces de advertencia apropiadas mientras se aparca (por ejemplo, utilizar la luz de estado del brick de programación EV3 para mostrar las luces de advertencia inversas). POSIBLE SOLUCIÓN: SIMULACIÓN DE ENGRANAJE INVERSO Y MARCHA ATRÁS LUCES DE ADVERTENCIA
- Iniciar el programa.
- Avanzar en línea recta a la velocidad deseada.
- Esperar 1 segundo.
- Encender la luz (luz de marcha atrás).
- Invertir la rotación del motor mientras gira para completar de 1.5 rotaciones
- Invierta la rotación del motor mientras gira en sentido contrario para una rotación de 1.5.
- Conducir hacia atrás en línea recta durante 0.5 rotaciones.
- Avanzar en línea recta durante 1 giro.
DESCARGAR CÓDIGO DE MUESTRA
Compartir Animar a los alumnos a compartir sus creaciones, pensamientos y procesos de aprendizaje usando texto, vídeos, imágenes o cualquier otro medio creativo. El profesor debe pedir a uno o dos grupos que muestren al resto de compañeros sus programaciones. Después debe crear un debate sobre qué funciona bien y qué debería mejorarse. Oportunidad de evaluación Las rúbricas específicas para evaluar las habilidades de pensamiento computacional se pueden encontrar en el apartado “Evaluación”.-
PARA AMPLIAR (45 min)